When I was a teenager I found a book on the internet simply titled “Build Your Own Underwater Robot”. I ordered it and sure enough the book contained instructions to do just that. When I entered high school I found that there were competitions that were based around the simple design from the book known as a sea perch. I was lucky enough to participate in two of these competitions at the naval academy in Annapolis Maryland.
Recently I have decided to revisit my high school experiences by trying to make a new robot which could dive deeper and send video back to the operator, the original design relied solely on the operator’s eyes for navigation.
Thrusters
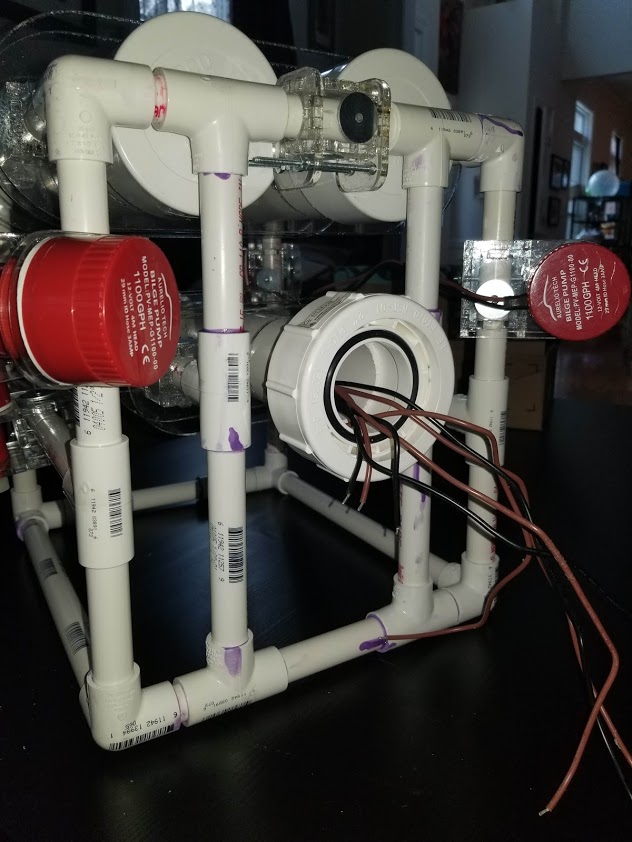
For my thrusters I decided to use these 12 volt bilge pumps as they were relatively inexpensive and already waterproofed. In total my design uses six of them.
As can be seen above each pump has an impeller which forces water out of the nozzle on the side. This is very efficient for pumping water out of a boat but it is less ideal for moving an object through the water.
To make the motors more efficient I cut off the outer housing so that a propeller could be added instead.
Here is a photograph of one of the propellers with a quarter to scale.
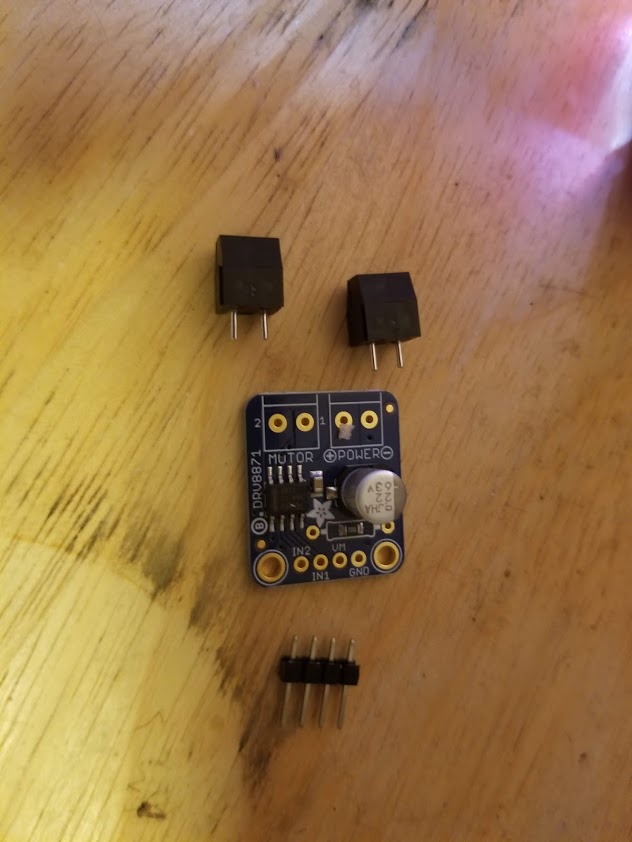
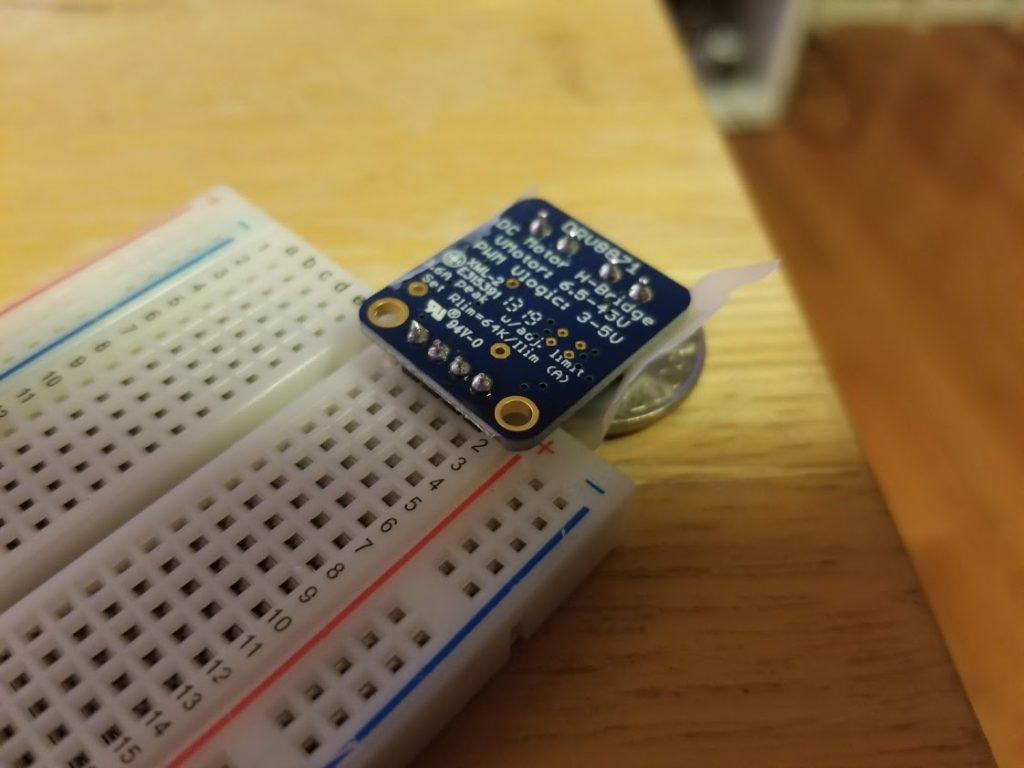
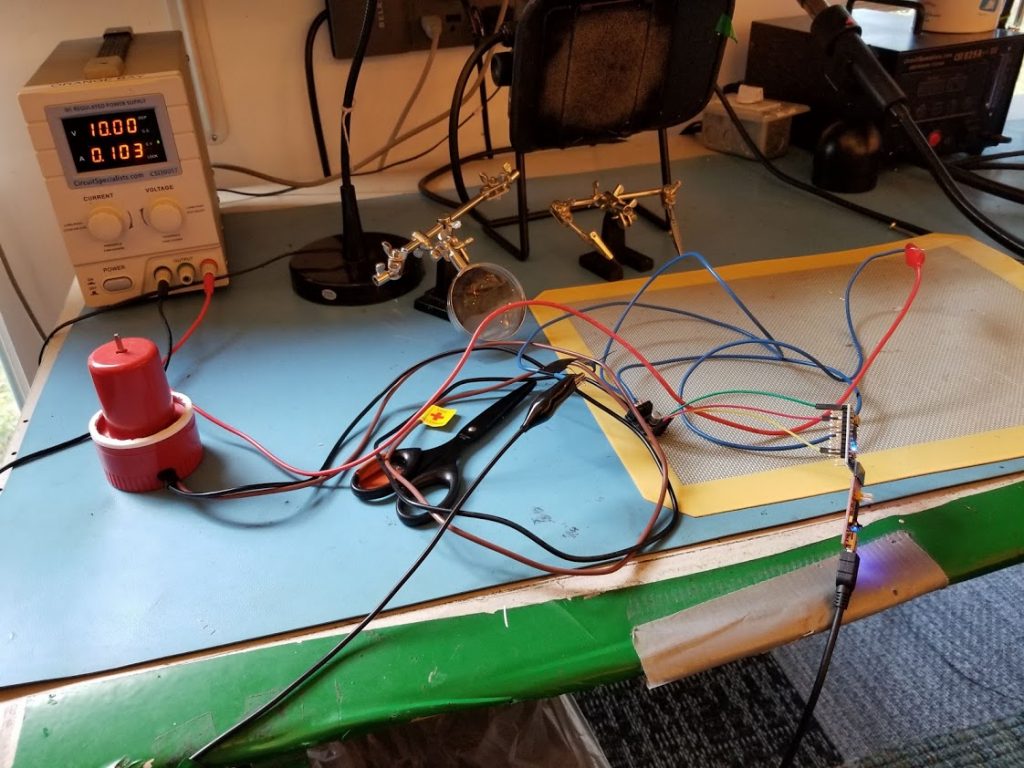
For my motor controller I knew I needed something that was small yet capable of handling the power needed for the 12 volt DC motors, I was able to find these motor controllers at adafruit, each one is only about the size of a quarter yet more than capable of accomplishing this task.
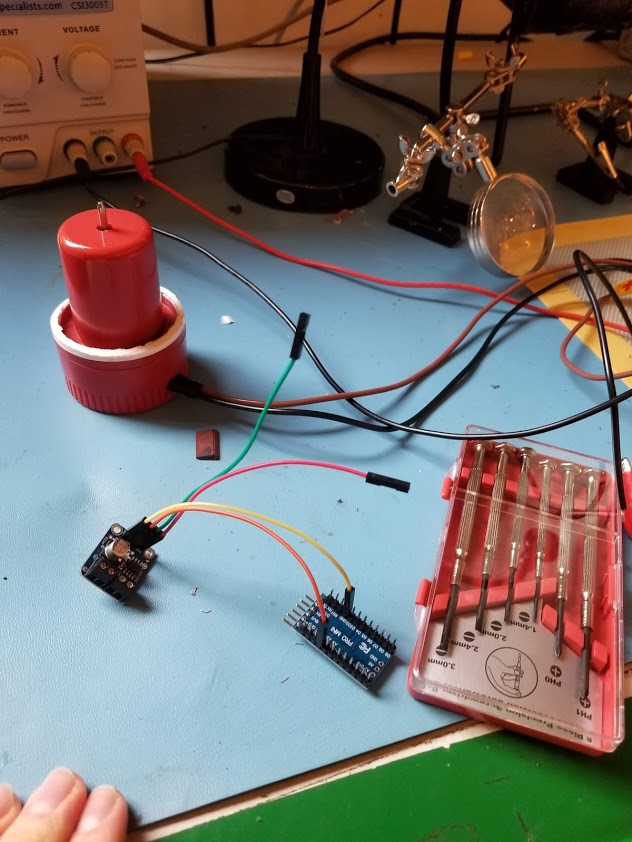
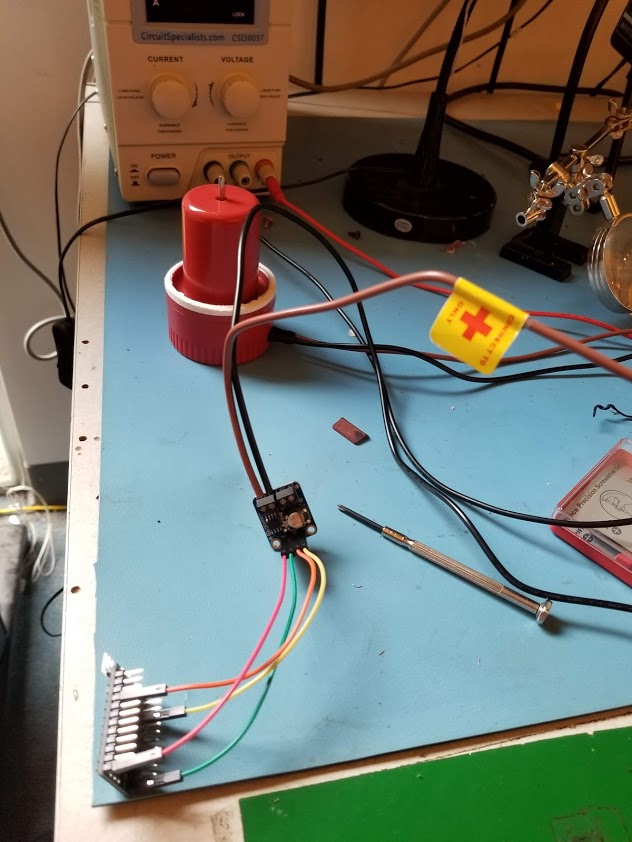
I conducted a simple test using a DC power supply to ensure that the motor worked properly.
Frame
The original book instructed to use PVC piping as the frame for the robot, I chose to use the same material for my new design as it was inexpensive, strong and could be easily used to make a wide variety of shapes.
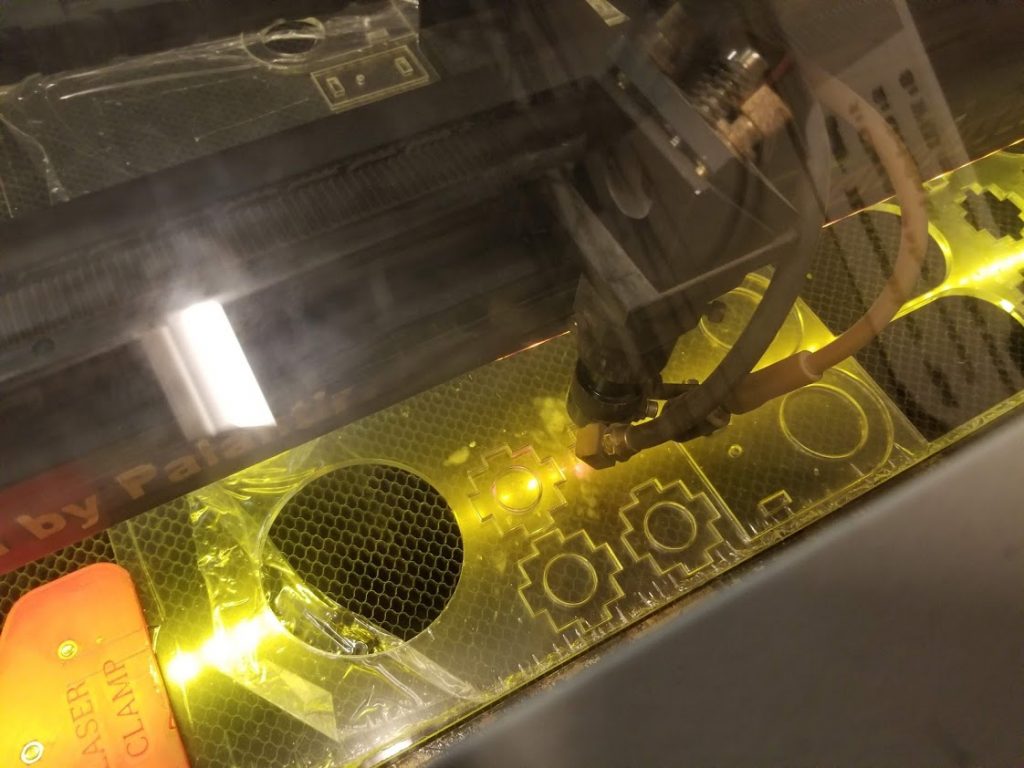
In order to attach all the thrusters and housings to the hull I needed to make a series of brackets, I choose to make them out of laser cut acrylic as it would allow me to make them fairly easily. While acrylic is more brittle when compared to some other plastics it should still be strong enough to hold the frame together.
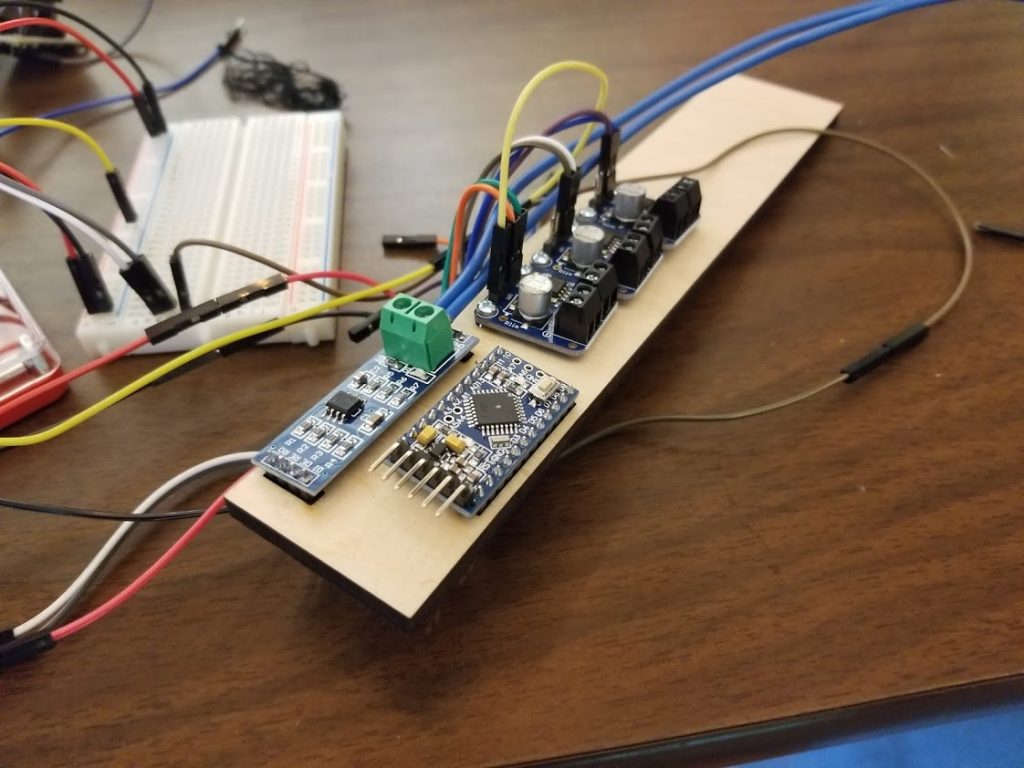
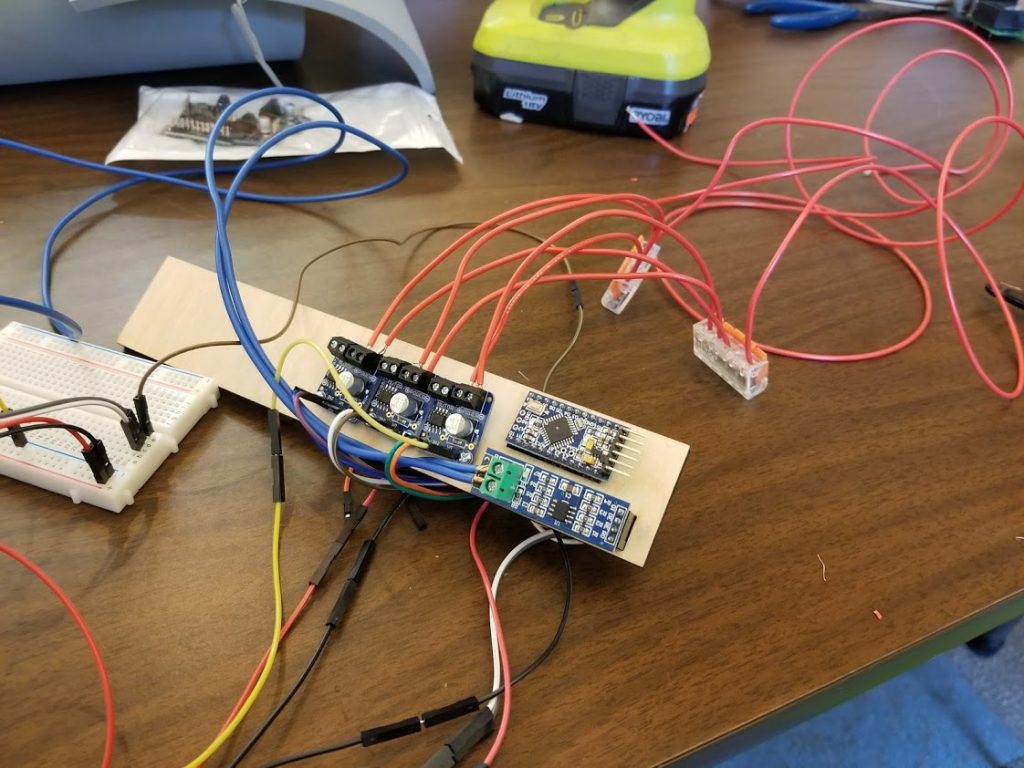
Control System & Communication
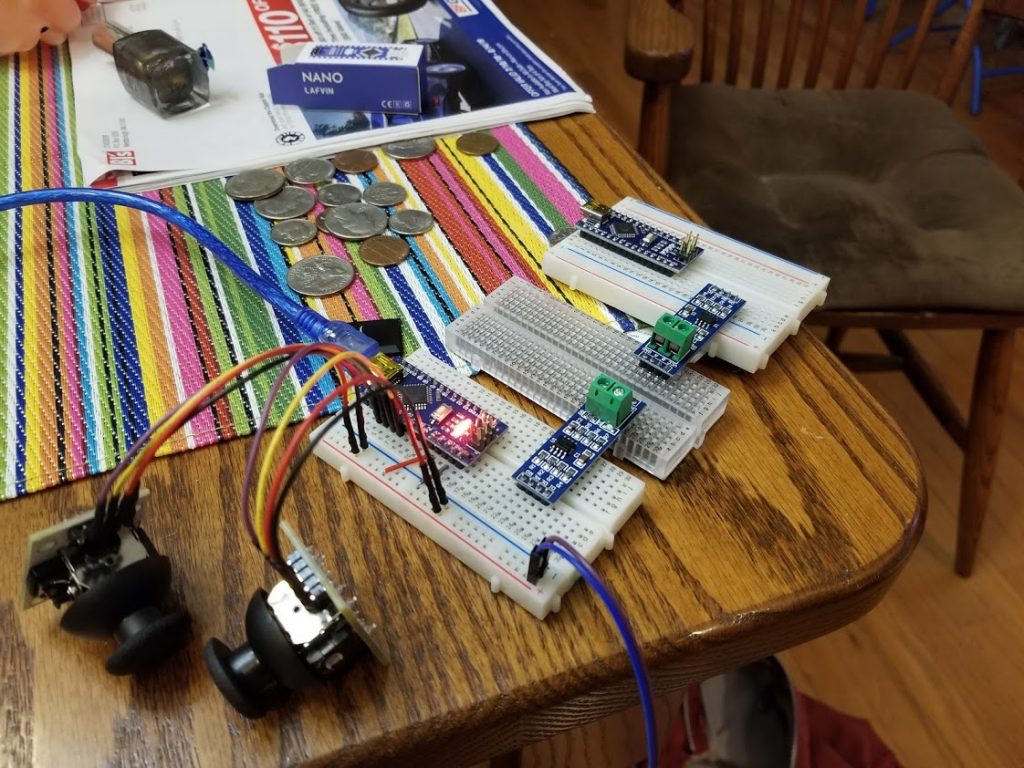
For my control system I made the decision to use the arduino mini and nano, essentially the same board but with different inputs, as I needed something small and I was already fairly familiar with the arduino platform. For communication I knew that the water would make radio control difficult or impossible, I needed some way to communicate using a 100 ft tether.
I was able to find a module for the arduino called the MAX485 TTL which uses RS485 protocol to ensure interference free communication.
To hold all of these components I was able to lasercut this piece of plywood to fit them all. In my final robot I will replace this with acrylic.